

1
Annotated Frames

GOOSE - the German Outdoor and Offroad Dataset - is a modern dataset specification and accompanying off-road dataset. In contrast to existing datasets, the focus is on unstructured off-road environments as well as on a broad support for different platforms and applications in the fields of mobile robotics and deep learning. The data is published under the CC BY-SA license and contains annotated point clouds, segmentation masks from RGB and NIR images, as well as accurate localization.
Participate in Fine-Grained 2D ChallengeNEW! 2D Fine-Grained Segmentation Challenge on Codabench

Basic platform documentation, training examples and pretrained weights.
ZIP files of training set including annotated RGB images and 3D Pointclouds.
Metadata bagfiles containing entire sequences with additional sensor raw data.
Additional data release from an excavator and a legged robot.
Setup of 2D & 3D semantic segmentation challenge leaderboard.
Setup of a Fine-grained 2D semantic segmentation challenge leaderboard.
The sequences were recorderd under different terrain and weather conditions to allow for a variety of applications.
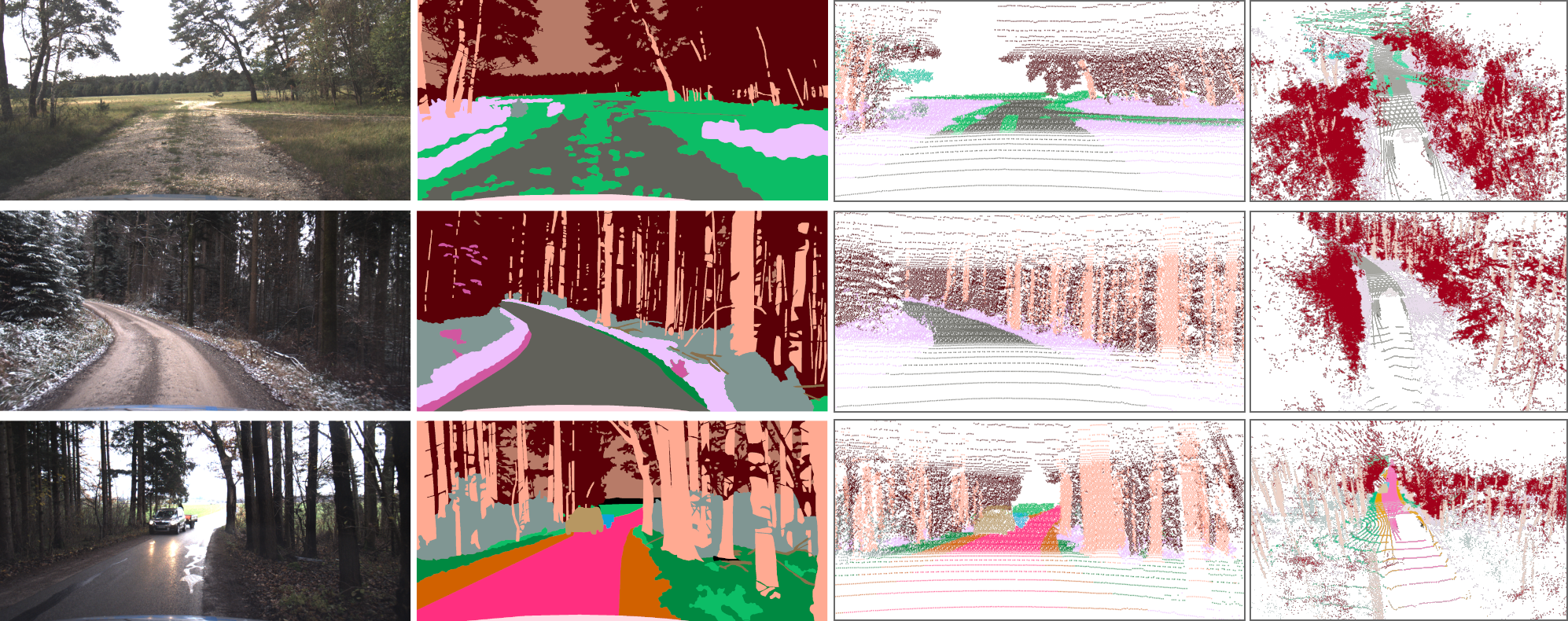
Instance-segmented RGB/NIR images correspond to pointwise annotated pointclouds from multiple LiDARs.
Additional data such as localization, additional camera views and raw sensor data from the whole sequence.
Ready-to-use for robotics development: We provide ROS-bags, code snippets and an extensive documentation.
Well defined onotology to be easily extended or used with other datasets.
Anyone can contribute data to the GOOSE database server using a well-defined scheme.
15000 image and point cloud frames in various environments.
Annotated Frames
Classes
Robotic Platforms
Hours of Recorded Data
Sequences
We provide extensive documentation for the dataset, including the labeling policy, code snippets, platform descriptions, calibration data, etc.
Access DocumentationIf you use the GOOSE Datasets in your work, please consider citing the following publications:
GOOSE Publication GOOSE-Ex Publication
@inproceedings{goose-dataset,
author = {Peter Mortimer and Raphael Hagmanns and Miguel Granero
and Thorsten Luettel and Janko Petereit and Hans-Joachim Wuensche},
title = {The GOOSE Dataset for Perception in Unstructured Environments},
url={https://arxiv.org/abs/2310.16788},
conference={Proceedings of IEEE International Conference on Robotics and Automation (ICRA)},
year = {2024}
}
@inproceedings{goose-ex-dataset,
author = {Raphael Hagmanns and Peter Mortimer and Miguel Granero
and Thorsten Luettel and Janko Petereit},
title = {Excavating in the Wild: The GOOSE-Ex Dataset for Semantic Segmentation},
url={https://arxiv.org/abs/2409.18788},
conference={Proceedings of IEEE International Conference on Robotics and Automation (ICRA)},
year = {2025}
}
GOOSE is a project of Fraunhofer IOSB, UniBW Munich and University of Koblenz.
Copyright © Fraunhofer IOSB






